
Cute:bot + joystick:bit
Introducción a la práctica: Controlamos un Cutebot con un joystick 🎮🤖
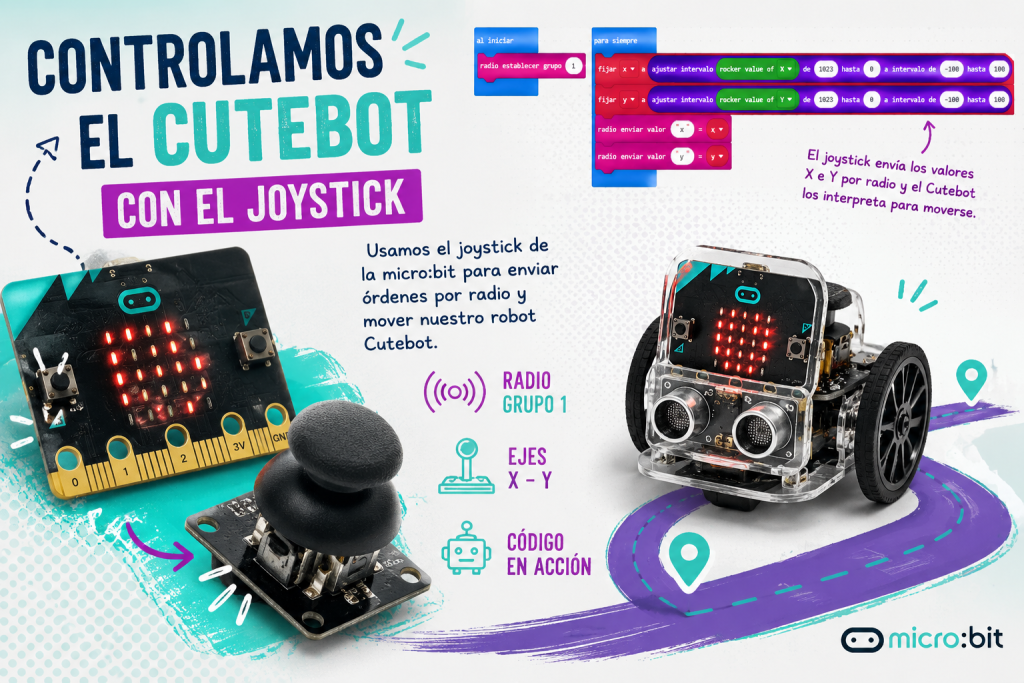
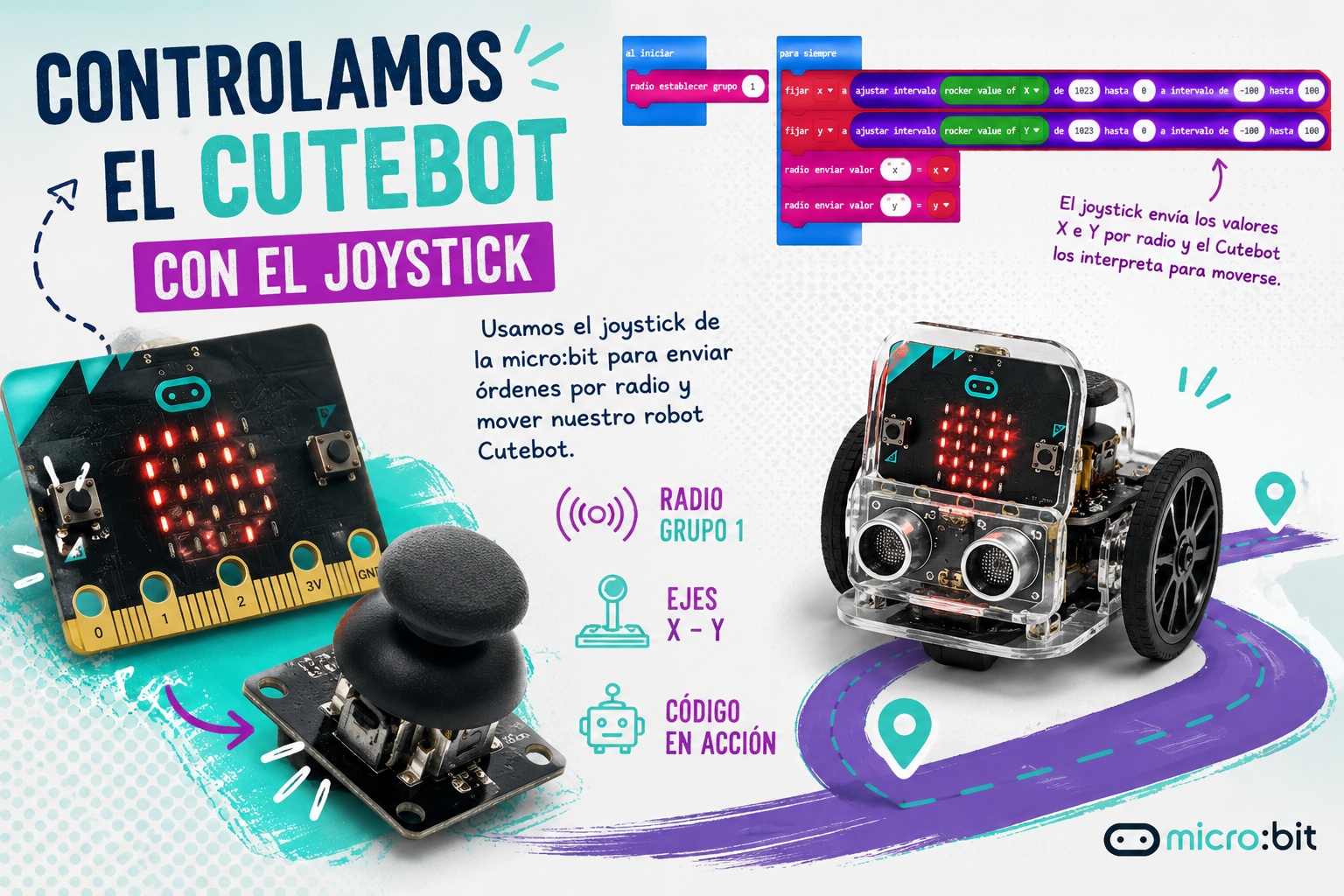
En esta práctica vamos a convertir nuestra micro:bit en un mando a distancia para controlar un robot Cutebot usando comunicación por radio. Gracias al joystick podremos mover el robot hacia delante, hacia atrás o girarlo simplemente moviendo la palanca, igual que ocurre en los videojuegos o en los coches teledirigidos.
Este proyecto es muy importante porque nos introduce en varias ideas fundamentales de la robótica y la programación:
- el uso de sensores;
- la comunicación inalámbrica;
- el envío de datos;
- y el control de robots en tiempo real.
Además, aprenderemos cómo un dispositivo puede “leer” información física del mundo real (el movimiento del joystick) y transformarla en números que otro dispositivo puede entender.
Explicación sencilla del código
1. Configuración inicial
al iniciar → radio establecer grupo 1
Cuando empieza el programa, la micro:bit se conecta al:
grupo de radio 1
Esto funciona como un “canal secreto” de comunicación.
Todas las micro:bit que estén en el mismo grupo podrán enviarse mensajes entre sí.
2. Bucle principal
para siempre
El programa se ejecuta continuamente mientras la micro:bit esté encendida.
La micro:bit:
- lee el joystick;
- convierte sus valores;
- y envía los datos al Cutebot constantemente.
3. Lectura del joystick
Eje X
rocker value of X
Lee el movimiento horizontal del joystick:
- izquierda;
- derecha.
Eje Y
rocker value of Y
Lee el movimiento vertical:
- adelante;
- atrás.
4. Ajuste de valores
El joystick devuelve números entre:
0 y 1023
Pero el robot necesita valores más simples.
Por eso usamos:
ajustar intervalo
para convertir esos números en valores entre:
-100 y 100
Así:
- números positivos → movimiento hacia delante o derecha;
- números negativos → movimiento hacia atrás o izquierda.
Es como traducir un idioma complicado a uno más sencillo para el robot.
5. Envío de datos por radio
radio enviar valor "x"
y
radio enviar valor "y"
La micro:bit envía continuamente:
- la posición horizontal;
- y la posición vertical del joystick.
La otra micro:bit, conectada al Cutebot, recibirá esos datos y moverá el robot.
¿Qué estamos aprendiendo realmente?
Con esta práctica estamos trabajando:
- programación por bloques;
- robótica educativa;
- comunicación inalámbrica;
- pensamiento computacional;
- control remoto;
- y conversión de datos.
Este tipo de sistemas se parece mucho a los utilizados en:
- drones;
- coches teledirigidos;
- robots industriales;
- videojuegos;
- y vehículos reales.
Etiqueta:cutebot, ies monterroso, microbit, montesteam, robótica

