
🤖 ¡El IES Monterroso en Marcha! Programando la Autonomía con Micro:bit y Cutebot
En el departamento de Tecnología e Informática del IES Monterroso, estamos llevando el aprendizaje más allá de las pantallas. Hoy queremos compartir con toda la comunidad educativa uno de nuestros retos más emocionantes: la creación de un robot síguelíneas utilizando la placa programable Micro:bit y el chasis robótico ElecFreaks Cutebot.
1. ¿Qué es el Cutebot y cómo se integra con Micro:bit?
El Cutebot es un chasis motorizado diseñado para la educación que convierte una pequeña placa Micro:bit en un vehículo inteligente
. En nuestras sesiones, hemos ensamblado el robot equipándolo con:
- Cerebro (Micro:bit): Procesa la lógica y las instrucciones.
- Motores y Ruedas: Permiten el movimiento físico del robot
.Fuente de energía: Un pack de baterías que alimenta tanto a la placa como a los motores.Sensores Infrarrojos: Situados en la parte inferior, son los “ojos” que detectan si el robot está sobre la línea negra o sobre el fondo blanco
- .
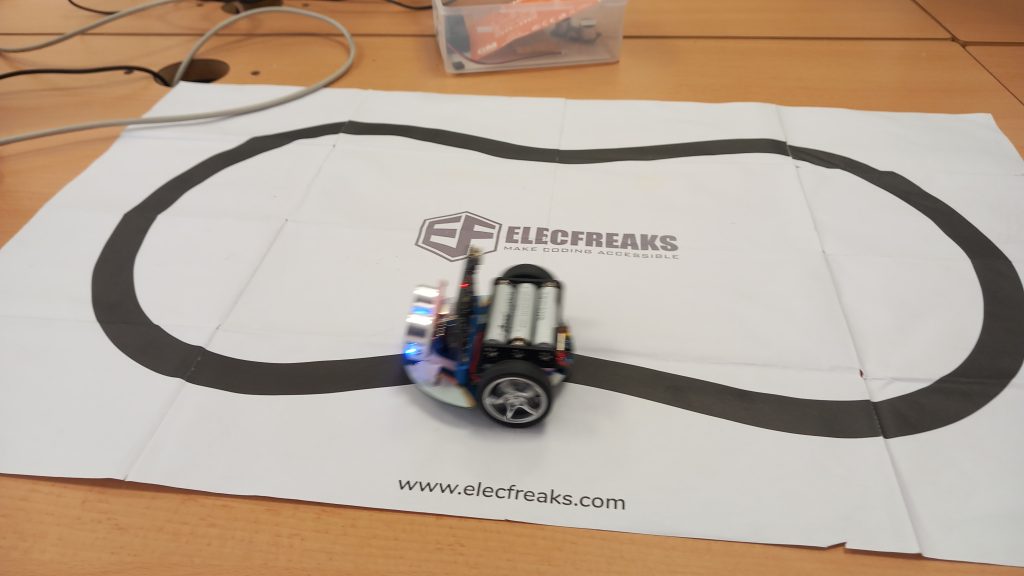
2. El Desafío: El Circuito de Seguimiento
Para poner a prueba nuestra programación, hemos diseñado un circuito cerrado con una línea negra continua sobre una superficie blanca
. El reto tecnológico consiste en que el robot debe tomar decisiones en milisegundos para corregir su trayectoria y nunca salirse del camino.
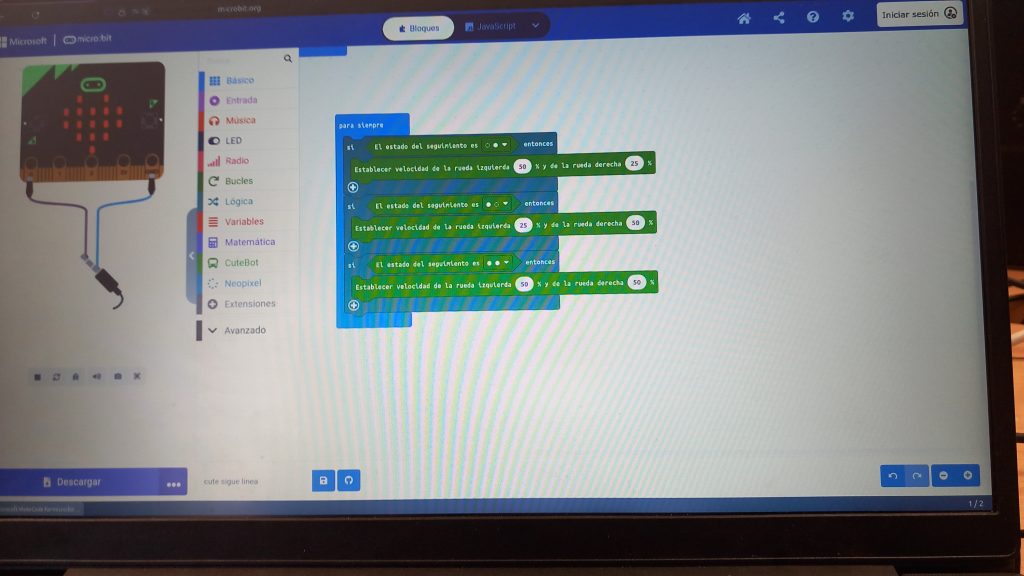
3. La Lógica del Código: ¿Cómo “piensa” nuestro robot?
Para que el Cutebot sea autónomo, hemos utilizado la plataforma de programación por bloques MakeCode. La clave está en un bucle “para siempre” que evalúa constantemente el estado de los sensores de seguimiento
. Aquí explicamos las tres reglas de oro que le hemos programado:
- Corrección a la Derecha: Si el sensor izquierdo detecta blanco y el derecho detecta la línea negra, el código ordena que la rueda izquierda gire al 50% y la derecha baje al 25%
. Esto hace que el robot pivote suavemente hacia la derecha para recentrarse.Corrección a la Izquierda: Si el sensor izquierdo pisa el negro y el derecho el blanco, invertimos las potencias: la rueda izquierda baja al 25% y la derecha sube al 50%. Así, el robot gira hacia la izquierda para seguir la curva.Avance Recto: Cuando ambos sensores detectan la línea negra simultáneamente (lo que significa que el robot está perfectamente alineado), los dos motores se estabilizan al 50% de velocidad, permitiendo un avance fluido y recto
- .
4. Reflexión Final
Este proyecto es un ejemplo perfecto de pensamiento computacional. No se trata solo de mover un juguete, sino de entender cómo los datos de los sensores se transforman en acciones físicas mediante algoritmos lógicos. En el IES Monterroso, ¡seguimos programando el futuro!
Promp;
Eres la mejor informatica y profesora del mundo…. Soy un alumno del Ies Monterroso, al que le han mandado una tarea sobre explicar el funcionamiento de una microbit con una cutebox.. Esta misma cutebox, ha sido programada para que haga la funcion de seguir una linea… Quiero que me expliques todo el proceso con el material que te he prporcionado. Tambien debes saber que esta misma explicacion que tu me pongas sera subida a la pagina del instituto, por lo que tiene que tener un titulo llamativo, y todo muy bien explicado… Dicho esto, es tu turno… Y tiene que ser un poco extensa la explicacion, no mucho pero extensa
